
جدول المحتويات:
- مؤلف John Day day@howwhatproduce.com.
- Public 2024-01-30 07:41.
- آخر تعديل 2025-01-23 12:54.

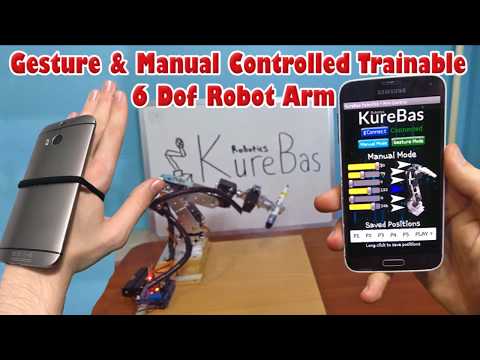
هناك وضعان في الذراع.
الأول هو الوضع اليدوي الذي يمكنك من تحريك الذراع بالبلوتوث في هاتفك المحمول عن طريق تحريك أشرطة التمرير في التطبيق. في نفس الوقت ، يمكنك حفظ مراكزك ويمكنك اللعب …
ثانيًا ، وضع الإيماءات الذي يستخدم مستشعر التوجيه ومستشعر القرب بهاتفك. عندما يتم تغييرها ، يرسل التطبيق أوامر إلى اردوينو …
KureBasArm - هذه خطوة أخرى للروبوت الجديد KureBas v 3.0
الخطوة الأولى: المواد المستعملة

6 DOF Robotic Arm Set 35 دولارًا
6x MG996r Metal Servo 30 دولارًا
16 قناة سيرفو شيلد 9 دولارات
وحدة بلوتوث HC-06 2.50 دولار
بطاريتان ليثيوم أيون 18650 بسعر 11.50 دولارًا
2x 18650 بطارية حامل 2 دولار
التكلفة الإجمالية: 90 دولارًا
الخطوة الثانية: كيفية إعداد الذراع الآلية


الخطوة 3: البرمجة


يمكنك الوصول إلى جميع الملفات في هذا الرابط (الرمز والتطبيق)
drive.google.com/open؟id=1JejPVpk6yYxPe6gNJJ5ALI4ptvwR07aD
الخطوة 4: تطبيق الهاتف

لقد صنعت التطبيق من مخترع MIT APP 2
موصى به:
سيارة RC يتم التحكم فيها عن طريق البلوتوث مع التحكم في السرعة وقياس المسافة: 8 خطوات

سيارة RC يتم التحكم فيها عن طريق البلوتوث مع التحكم في السرعة وقياس المسافة: عندما كنت طفلاً ، كنت دائمًا مفتونًا بسيارات RC. في الوقت الحاضر ، يمكنك العثور على العديد من البرامج التعليمية لصنع سيارات RC رخيصة الثمن يتم التحكم فيها عن طريق البلوتوث بمساعدة Arduino. لنأخذ خطوة إلى الأمام ونستخدم معرفتنا العملية بالكينماتيكا لحساب
روبوت اردوينو بمسافة واتجاه ودرجة دوران (شرق ، غرب ، شمال ، جنوب) يتم التحكم فيها عن طريق الصوت باستخدام وحدة البلوتوث وحركة الروبوت المستقلة: 6 خطوات
 يتم التحكم فيها عن طريق الصوت باستخدام وحدة البلوتوث وحركة الروبوت المستقلة: 6 خطوات")
روبوت اردوينو بمسافة واتجاه ودرجة دوران (شرق ، غرب ، شمال ، جنوب) يتم التحكم فيها عن طريق الصوت باستخدام وحدة Bluetooth وحركة الروبوت الذاتية: يشرح هذا Instructable كيفية صنع Arduino Robot الذي يمكن تحريكه في الاتجاه المطلوب (للأمام والخلف ، يسار ، يمين ، شرق ، غرب ، شمال ، جنوب) المسافة المطلوبة بالسنتيمتر باستخدام الأمر الصوتي. يمكن أيضًا نقل الروبوت بشكل مستقل
كيفية تجميع ذراع روبوت خشبي مثير للإعجاب (الجزء 3: ذراع الروبوت) - استنادًا إلى الميكرو: بيت: 8 خطوات
 - استنادًا إلى الميكرو: بيت: 8 خطوات")
كيفية تجميع ذراع روبوت خشبي مثير للإعجاب (الجزء 3: ذراع الروبوت) - استنادًا إلى الميكرو: BITN: تعتمد عملية التثبيت التالية على إكمال وضع تجنب العائق. عملية التثبيت في القسم السابق هي نفس عملية التثبيت في وضع تتبع الخط. ثم دعونا نلقي نظرة على الشكل النهائي لـ A
كيفية بناء روبوت متحكم به ذراع القابض يتم التحكم فيه عن طريق Nrf24l01 Arduino: 3 خطوات (بالصور)
")
كيفية بناء روبوت متحكم به ذراع القابض يتم التحكم فيه عن طريق Nrf24l01 Arduino: التعليمات & quot؛ كيفية بناء روبوت متعقب بذراع القابض يتم التحكم فيه عبر Nrf24l01 Arduino & quot؛ سوف يشرح كيفية بناء ثلاث درجات من ذراع قابض الحرية مثبتة على عجلة مجنزرة مدفوعة بمحرك مزدوج L298N باستخدام وحدة MEG
سيارة روبوت يتم التحكم فيها عن طريق البلوتوث باستخدام اردوينو: 8 خطوات (مع صور)
")
سيارة روبوت يتم التحكم فيها عن طريق البلوتوث باستخدام Arduino: في هذه التعليمات ، سأوجهك إلى صنع سيارة روبوت تتحكم في Bluetooth من هاتفك المحمول الذي يعمل بنظام Android. ليس ذلك فحسب ، فالسيارة الآلية تتمتع بقدرة خاصة على تجنب العقبات التي تواجهها عند تحريك السيارة إلى الأمام. الروبوت