")
جدول المحتويات:
- مؤلف John Day day@howwhatproduce.com.
- Public 2024-01-30 07:36.
- آخر تعديل 2025-01-23 12:53.




تتيح طبيعة Otto مفتوحة المصدر حقًا تعليم STEAM مفتوحًا ، فنحن نجمع التعليقات من ورش العمل والمدارس المختلفة حول العالم التي تستخدم بالفعل Otto DIY في الفصول الدراسية واعتمادًا على انفتاح هذه الأماكن التعليمية ، ننظم مواد الدرس ونشاركها أيضًا.
ترخيص CC-BY-SA Creative Commons يعني أنه يمكنك النسخ مجانًا ولكن يجب عليك منح أرصدة إلى الأصل عن طريق وضع موقعنا على الويب (https://www.ottodiy.com/)
Otto DIY + هي النسخة المحسنة والمتقدمة من #OttoDIY الأصلي ، والفكرة هي أن يكون لديك نفس الميزات الأساسية للروبوت DIY + التحكم في البلوتوث والبرمجة + محركات مؤازرة للعتاد المعدني + قابلة لإعادة الشحن + أوضاع متغيرة عن طريق مستشعر اللمس + مستشعر الصوت + حركات الضوء + نواتج أخرى +…؟
الجزء المثير هو أننا نقوم بتطوير مفتوح مع صانعي ومتسللين في جميع أنحاء العالم ، لذلك نحن منفتحون على الأفكار ، ليس فقط من الخبراء الذين يمكنك الانضمام إلينا ، أو التعليقات ، أو المشاركة الاجتماعية ، أو الاختبار أو أي مساهمة أخرى قد تفكر فيها.
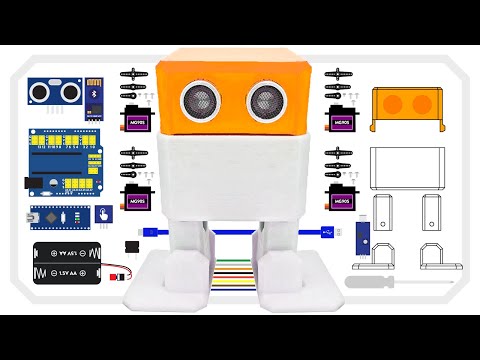
اللوازم
1 × اردوينو نانو
1 × وحدة بلوتوث HC-06 أو HC-05
1 × Arduino Nano Shield I / O ؛ يمكنك استخدام لوح تجارب صغير ولكن المزيد من أعمال الكابلات
1 × USB-A إلى كابل Mini-USB
4 × مايكرو سيرفو MG90s (معدن)
1 × الجرس
10 × أسلاك توصيل أنثى / أنثى
1 × مستشعر اللمس
1 × مستشعر صوت
1 × 8x8mm مايكرو التبديل القفل الذاتي تشغيل / إيقاف
1 × 3.7 فولت بطارية LiPo مع معززة إلى 5 فولت (اختياري) 1 × مفك براغي فيليبس 1 × طابعة ثلاثية الأبعاد (أو استخدم خدمة أو صديق ؛))
الخطوة 1: إعدادات الطابعة ثلاثية الأبعاد

من المهم قراءة أول تعليمات سابقة لـ Otto DIY للتعرف على أساسيات بناء روبوت ذو قدمين احصل على جميع أجزاء STL المطبوعة ثلاثية الأبعاد والأكواد والمكتبات الخاصة بـ Bluetooth بالانتقال إلى هنا https://wikifactory.com/+OttoDIY/otto-diy- زائد في علامة تبويب الملفات
- يوصى باستخدام طابعة FDM ثلاثية الأبعاد مع مادة PLA.
- لا حاجة للدعم أو الأطواف على الإطلاق.
- القرار: 0.15 مم
- كثافة التعبئة 20٪
تحتاج إلى ضبط الحجم ، بعض التغييرات ، استخدم الملف المصدر الذي تم إنشاؤه في Autodesk Fusion 360
أو Tinkercad هنا
الخطوة 2: قم ببناء Otto DIY الخاصة بك



في الفيديو والصور التالية ، يمكنك الحصول على مرجع لكيفية بناء Otto DIY + ، بسبب بعض الإصدارات الجديدة من تصميم الروبوت.
الخطوة 3: اكتب رمز Otto الخاص بك





لذلك حتى هذه اللحظة ، يجب أن يكون لديك Otto 3D مطبوعة ومجمعة ، والآن بعض البرمجة لديك مكتبات و Arduino مثبتة على جهاز الكمبيوتر الخاص بك.
أسهل طريقة لترميز Otto الخاصة بك هي استخدام برنامج Blockly الخاص بنا ، حيث يمكن للمبرمج الأكثر تقدمًا تجربة Arduino IDE مباشرةً.
الخطوة 4: الكود الرئيسي لتطبيق Bluetooth




يحتاج Otto إلى أن يكون جاهزًا لتلقي الأوامر عبر البلوتوث ولهذا يحتاج إلى وضع الكود الرئيسي داخل دماغه
- انسخ مكتبات Otto إلى مجلد Arduino IDE
- تحميل رسم APP.ino إلى Otto
- قم بتنزيل التطبيق وتثبيته على هاتفك الذكي. متجر Google Play (https://play.google.com/store/apps/details؟id=com.ottodiy)
- يمكنك الآن توصيل الوحدة وتمكين Bluetooth في هاتفك.
- ابحث عن Otto وقم بإقران عنوان / اسم Bluetooth
- الآن يمكنك استخدام التطبيق للتحكم في Otto!
- العب بالميزات الجديدة وإذا لم يكن الأمر كذلك ، فقد تحتاج إلى إعادة تكوين BT الخاص بك ولكن لا تقلق فهو أيضًا سهل ؛)
الخطوة 5: النسخ والتوسيع والتخصيص والتعديل وإعادة المزج والمشاركة




تحقق من منشور المدونة هذا للعثور على أفكار حول كيفية تخصيص الروبوت الخاص بك
انضم إلى مجتمع Otto Builder! تابعنا ، وامنحنا إعجابًا وشارك إبداعك ، يمكن أن تظهر هنا من خلال مشاركة الروبوت الخاص بك في أي وسائط اجتماعية
Facebook و Instagram
استخدم علامة التصنيف #ottodiy في منشورك وقم بوضع علامة أو اذكرOttoDIY
كن جزءًا من هذا المجتمع الودود من بناة الروبوتات والمعلمين والصناع! من خلال الانضمام إلينا هنا
الخطوة 6: إعداد Bluetooth (BT) (فقط في حالة عدم نجاح الاقتران):
هذا الإعداد مطلوب فقط للوحدات التي لا تأتي مع معدل البث بالباود القياسي 9600 ، كيف تعرف؟ ما عليك سوى تجربة الكود والتطبيق أولاً ، إذا كان الهاتف لا يقترن بـ Otto أو يستجيب للأوامر ، فربما يعني ذلك أن الوحدة الخاصة بك في معدل باود مختلف ، لذا يلزم تهيئتها
يحتوي كود BT على 115200 معدل باود ، لذا يجب أن تتطابق وحدة BT مع هذه السرعة لتتمكن من التواصل مع Arduino Nano عبر الواجهة التسلسلية (UART).
لـ HC-05: 38400 أو 115200
1. قم بتحميل المخطط HC05_BT_config.ino على جهاز Nano الخاص بك أولاً ، ثم افصل Nano من USB.
2. الآن قم بتوصيل BT بـ Arduino Nano كما هو موضح في الرسم التخطيطي ولكن لا تقم بتوصيل VCC.
TX - RX
RX - TX
VCC - 5 فولت
GND - GND
3. قم بتوصيل USB بـ Nano ثم قم بتوصيل VCC حتى تدخل BT في وضع AT. يجب أن يبدأ مؤشر LED الموجود على BT في الوميض بشكل أبطأ ، بمعدل مرة كل ثانيتين تقريبًا. (إذا لم يفلح ذلك ، فحاول الضغط على الزر الموجود على وحدة BT أثناء توصيل VCC).
افتح الشاشة التسلسلية في IDE ، واضبط معدل البث بالباود على 9600 ونهاية السطر على كلا NL & CR.
اكتب AT ثم اضغط على Enter ؛ (إذا كان كل شيء على ما يرام ، يجب أن تستجيب BT بـ OK ثم تدخل الأوامر التالية:
AT + NAME = Zowi "تعيين الاسم"
AT + PSWD = 1234 "كلمة مرور الاقتران"
AT + UART = 115200 ، 1 ، 0 "معدل البث بالباود"
AT + POLAR = 1 ، 0 "تمكين استخدام دبوس STATE كإعادة تعيين لبرمجة اردوينو عبر BT"
انتقل الآن إلى خطوة APP
في حالة وجود أي مشكلة ، تحقق من هذا الدليل حول كيفية تعديل الإعدادات الافتراضية لوحدة HC-05 Bluetooth باستخدام أوامر AT
www.instructables.com/id/Modify-The-HC-05-…
بالنسبة إلى HC-06: 9600 أو 115200
بالنسبة إلى وحدة HC-06 BT ، تكون الأمور أبسط قليلاً لأن الوحدة تكون دائمًا في وضع أوامر AT عندما لا تكون متصلة بأي شيء. لكن الجانب السلبي هو أنه لا يمكن استخدام وحدة HC-06 لتحميل الرسومات على Arduino لأنه لم تتم إعادة تعيينها. لتكوين الوحدة النمطية
1. قم بتحميل هذا الرسم التخطيطي HC06_BT_config.ino إلى جهاز Nano الخاص بك
1. افصل USB
2. قم بتوصيل وحدة BT بـ Arduino Nano مثل هذا:
TX - RX
RX - TX
VCC - 5 فولت
GND - GND
3. قم بتشغيل جهاز Nano الخاص بك وبعد حوالي 10-15 ثانية يجب الانتهاء من كل شيء ويجب تكوين BT (يجب أن يبدأ مؤشر LED13 في الوميض).
في حالة وجود أي مشكلة ، تحقق من هذا
في حالة وجود أي سؤال ، لا أحصل على إشعارات من خلال التعليقات الجديدة القابلة للتوجيه ، لذا إذا كان هناك أي شيء ، فيرجى نشره في مجتمعنا
موصى به:
GorillaBot روبوت Arduino المستقل رباعي الأرجل بطباعة ثلاثية الأبعاد: 9 خطوات (بالصور)
")
GorillaBot ، روبوت Arduino المستقل رباعي الأرجل بطباعة ثلاثية الأبعاد: كل عام في تولوز (فرنسا) يوجد سباق Toulouse Robot # TRR2021 يتكون السباق من سباق 10 أمتار للروبوتات ذات قدمين ورباعية. عدو سريع لمسافة 10 أمتار. مع ذلك في m
لوحة مفاتيح ماكرو مطبوعة ثلاثية الأبعاد من Arduino: 6 خطوات (مع صور)
")
لوحة مفاتيح ماكرو مطبوعة ثلاثية الأبعاد من Arduino: كان هذا أول مشروع لي أعمل مع Arduino Pro Micro. يمكنك استخدامه في الدردشات Zoom أو Discord للقيام بأشياء مثل تبديل كتم الصوت أو تبديل الفيديو أو مشاركة شاشتك. علاوة على ذلك ، يمكنك برمجته لفتح البرامج المستخدمة بشكل متكرر على
متزلج كاميرا تتبع الكائن مع محور الدوران. طباعة ثلاثية الأبعاد ومبنية على وحدة تحكم محرك RoboClaw DC و Arduino: 5 خطوات (بالصور)
")
متزلج كاميرا تتبع الكائن مع محور الدوران. 3D مطبوعة ومبنية على RoboClaw DC Motor Controller & Arduino: كان هذا المشروع أحد مشاريعي المفضلة منذ أن تمكنت من الجمع بين اهتماماتي في صناعة الفيديو مع DIY. لطالما نظرت وأردت محاكاة تلك اللقطات السينمائية في الأفلام حيث تتحرك الكاميرا عبر الشاشة أثناء التحريك لتتبع
OAREE - طباعة ثلاثية الأبعاد - روبوت تجنب عقبة للتعليم الهندسي (OAREE) مع Arduino: 5 خطوات (بالصور)
 مع Arduino: 5 خطوات (بالصور)")
OAREE - 3D Printed - Obstacle Avoiding Robot for Engineering Education (OAREE) مع Arduino: OAREE (Obstacle Avoiding Robot for Engineering Education) التصميم: كان الهدف من هذه التعليمات هو تصميم روبوت OAR (Obstacle Avoiding Robot) الذي كان بسيطًا / مضغوطًا ، 3D قابل للطباعة ، سهل التجميع ، يستخدم أجهزة دوران مستمرة للحركة
Joy Robot (Robô Da Alegria) - طباعة ثلاثية الأبعاد مفتوحة المصدر ، روبوت يعمل بتقنية Arduino: 18 خطوة (بالصور)
 - طباعة ثلاثية الأبعاد مفتوحة المصدر ، روبوت يعمل بتقنية Arduino: 18 خطوة (بالصور)")
Joy Robot (Robô Da Alegria) - مطبوعة ثلاثية الأبعاد مفتوحة المصدر ، روبوت مدعوم من Arduino!: الجائزة الأولى في مسابقة Instructables Wheels ، والجائزة الثانية في مسابقة Instructables Arduino ، والمركز الثاني في تحدي التصميم للأطفال. شكرا لكل من صوت لنا !!! الروبوتات تنتشر في كل مكان. من التطبيقات الصناعية إلى