
جدول المحتويات:
- مؤلف John Day day@howwhatproduce.com.
- Public 2024-01-30 07:39.
- آخر تعديل 2025-01-23 12:54.

منذ بعض الوقت قمت بنشر جهاز التحكم Wifi PPM الخاص بي. انها تعمل بشكل جيد فقط النطاق قصير بعض الشيء. لقد وجدت حلا لهذه المشكلة. يدعم ESP8266 وضعًا يسمى ESPNOW. هذا الوضع هو مستوى منخفض أكثر بكثير. ليس من السهل الاتصال ، وإذا فقد الاتصال ، يتم إعادة توصيله على الفور.
أستخدم ثلاثة ESP8266. واحد هو مستقبل ESPNOW ، والآخر هو مرسل ESPNOW والثالث هو نقطة الوصول التي يمكنك الاتصال بها. الثالث مطلوب لأن مرسل ESPNOW لا يمكن أن يكون نقطة وصول في نفس الوقت ، كما أنني أضفت بعض الهوائيات للحصول على نطاق أفضل.
هناك نقطة وصول ثانية مباشرة في جهاز الاستقبال. إذا قمت بالاتصال بهذا ، فسيكون لديك نفس الشيء مثل مشروع WifiPPM القديم.
أضفت أيضًا دعمًا لجهاز استقبال بروتوكول MSP. هذا هو "بروتوكول MultiWii التسلسلي" الذي تدعمه MultiWii و Betaflight و Cleanflight والعديد من وحدات التحكم في الطيران الأخرى.
الخطوة 1: قائمة الأجزاء




أنت بحاجة إلى ثلاث وحدات ESP8266 من أي نوع. لكنك تريد أفضل مجموعة. لذلك أقترح استخدام وحدات ESP8266 مع الهوائيات. يعمل أيضًا بدون هوائيات. أستخدم الأجزاء التالية:
2 × ESP07 (وحدة ESP8266 مع موصل هوائي)
1 × ESP12
1 × 3dBi Mini Antenne I-PEX U. FL IPX في جانب المتلقي
1 × ESP8266 2 ، 4/5 جيجاهرتز 3dbi Wlan Wifi Antenne SMA Stecker / ذكر + محول I-PEX في جانب المرسل
3 ، مصدر طاقة 3 فولت لجميع وحدات ESP8266
تحتاج أيضًا إلى جهاز كمبيوتر مع Arduino IDE: https://www.arduino.cc/en/Main/SoftwareESP8266 دعم Arduino IDE. اتبع هذه التعليمات: https://learn.sparkfun.com/tutorials/esp8266-thin… مكتبة Websocket لـ Arduino:
الخطوة 2: قم بتنزيل الرسومات التخطيطية وفلاشها



يمكنك تنزيل الرسومات هنا.
قم بفك ضغط الملف. هناك ثلاثة مجلدات: Master-AP و Sender و Receiver
Master-AP: هو الرسم التخطيطي لنقطة الوصول. افتح الرسم باستخدام arduino IDE. اضبط تردد وحدة المعالجة المركزية على 160 ميجاهرتز في قائمة الأدوات وقم بتحميل الرسم التخطيطي إلى ESP12.
المرسل: هذا هو الرسم التخطيطي لمرسل MSPNOW. اضبط تردد وحدة المعالجة المركزية على 160 ميجاهرتز وقم بتحميله على أحد ESP07.
يمكنك أن ترى في الصورة الأولى كيفية توصيل وحدة ESP8266 بالوميض.
الآن قم بتوصيل ESP12 (نقطة الوصول) والمنافذ التسلسلية للمرسل ESP07 ووصلات الطاقة (الصورة الثانية): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
ابدأ كلا الوحدتين واتصل بنقطة الوصول "Long-Range-WifiPPM / MSP". كلمة المرور هي "WifiPPM / MSP"
افتح متصفحًا وافتح عنوان IP 192.168.4.1. سيظهر موقع التحكم. انقر على زر "Wifi Info". سيظهر مربع رسالة مع المرسل MAC وجهاز الاستقبال MAC.
افتح رسم المستقبل في Arduino IDE. قم بتغيير السطر "uint8_t sendermac = {0x5C، 0xCF، 0x7F، 0x77، 0xAB، 0xA6}؛" (الصورة الثالثة) إلى عنوان Mac المرسل المعروض في الموقع. يجب أن يكون جهاز الاستقبال Mac على ما يرام. تأكد من ضبط تردد وحدة المعالجة المركزية على 160 ميجاهرتز وقم بتحميل المخطط على ESP05 الثاني.
الخطوة 3: قم بتوصيل جهاز الاستقبال بجهاز التحكم في الطيران وإعداد Cleanflight



قم الآن بتوصيل جهاز الاستقبال بجهاز التحكم في الرحلة. يجب أن يكون لمتحكم الطيران الخاص بك خرج 3 ، 3 فولت مع 200 مللي أمبير على الأقل. إذا لم يكن الأمر كذلك ، فأنت بحاجة إلى منظم جهد إضافي 3 ، 3 فولت.
قم بتوصيل GND الخاص بـ ESP بـ GND الخاص بجهاز التحكم في الطيران. قم بتوصيل VCC الخاص بـ ESP بـ 3 ، 3 فولت لوحدة التحكم في الرحلة أو بمنظم الجهد الإضافي 3 ، 3 فولت.
يمكنك استخدام إخراج PPM أو إخراج MSP التسلسلي.
بالنسبة لمخرج MSP ، قم بتوصيل TX من ESP8266 إلى RX لأي منفذ تسلسلي لوحدة التحكم في الرحلة. (الصورة 1)
بالنسبة لمخرج PPM ، قم بتوصيل GPIO5 الخاص بـ ESP8266 بإدخال PPM لوحدة التحكم في الطيران. (الصورة 1)
بعد توصيل الأسلاك ، ابدأ ESP بوحدة التحكم في الطيران وافتح ضوءًا نظيفًا. اتصل بهاتفك المحمول بنقطة الوصول "WifiPPM / MSP". كلمة المرور هي "WifiPPM / MSP"
بالنسبة لـ MSP: افتح علامة تبويب المنافذ وقم بتعيين MSP على المنفذ التسلسلي الذي قمت بتوصيل ESP8266 (الصورة 2). الحفظ وإعادة التشغيل. انتقل إلى علامة تبويب التكوين واضبط جهاز الاستقبال على "مستقبل تسلسلي MSP" (الصورة 3). احفظها وأعد تشغيلها.
بالنسبة إلى PPM: اقرأ في دليل جهاز التحكم في الرحلة كيفية إعداد PPMGo إلى علامة تبويب التكوين واضبط جهاز الاستقبال على "مستقبل PPM" (الصورة 4). احفظها وأعد تشغيلها.
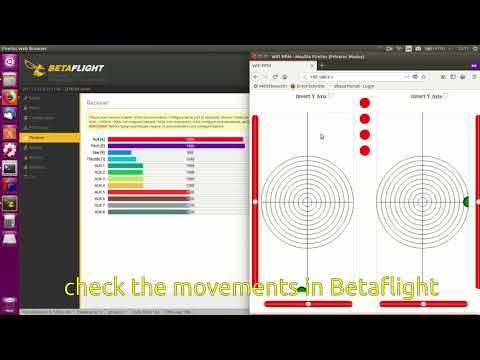
الإعداد التالي لكلا المستقبلين هو نفسه: انتقل إلى علامة تبويب جهاز الاستقبال. اضبط القنوات على "RTAE1234" (صورة 5 / فيديو). احفظ الإعداد.
افتح الآن متصفحًا على هاتفك الذكي. افتح الموقع 192.168.4.1 (الصورة 6). الآن يمكنك التحقق من وحدة التحكم.
إذا كان يعمل ، فابدأ المرسلين ESP8266. اتصل بنقطة الوصول "Long Range WifiPPM / MSP". كلمة المرور هي "WifiPPM / MSP". افتح موقع الويب 192.168.4.1 مرة أخرى. تحقق مرة أخرى في Cleanflight إذا كان يعمل.
قم بتوصيل الهوائيات بوحدات ESP07.
الخطوة 4: بعض مزيد من المعلومات

هناك نقطتا وصول في التشغيل العادي. تشبه نقطة الوصول "WifiPPM / MSP" مشروع WifiPPM السابق. يمكنك استخدامه إذا كنت تريد فقط القيام برحلة سريعة دون توصيل أي وحدات إضافية عندما لا تحتاج إلى اتصال بعيد المدى. إذا قمت بالاتصال بـ "Long Range WifiPPM / MSP" ، فإن جهاز التحكم طويل المدى هو الذي يتحكم.
ربما تريد معرفة طول "المدى البعيد". في الواقع أنا لا أعرف حقًا. إنها على الأقل بضع مئات من الأمتار. لكنني لم أتمكن من اختباره حتى الآن. إنه لا يفقد الاتصال في شقتي الكاملة.
أضفت تحكم MSP لأنني اعتقدت أنه يمكنني إنشاء قناة خلفية لبيانات القياس عن بُعد. لكن هذا لم ينجح أبدًا. على أي حال ، بروتوكول MSP أكثر دقة من جزء في المليون ، لأنه لا يعتمد على التوقيت كثيرًا. ربما يتسبب في مشاكل مع وحدات التحكم في الطيران البطيئة نظرًا لوجود حركة مرور كثيفة على المنفذ التسلسلي. مع جهاز التحكم في الطيران Noxe F4 ، يعمل بدون مشاكل.
إذا كان لديك أي مشاكل في التكوين ، فقم بإلقاء نظرة على مشروع WifiPPM القديم.
موصى به:
محطة الطقس طويلة المدى HC-12 وأجهزة استشعار DHT: 9 خطوات

محطة طقس طويلة المدى HC-12 ومستشعرات DHT: في هذا البرنامج التعليمي سوف نتعلم كيفية إنشاء محطة طقس بعيدة المدى باستخدام مستشعرين dht ووحدات HC12 وشاشة I2C LCD
الشروع في العمل مع مستشعرات درجة الحرارة والاهتزاز اللاسلكية طويلة المدى: 7 خطوات

الشروع في العمل مع مستشعرات درجة الحرارة والاهتزاز اللاسلكية طويلة المدى: في بعض الأحيان يكون الاهتزاز هو سبب المشكلات الخطيرة في العديد من التطبيقات. من أعمدة الماكينة والمحامل إلى أداء القرص الصلب ، يتسبب الاهتزاز في تلف الماكينة ، والاستبدال المبكر ، وانخفاض الأداء ، وإحداث ضرر كبير في الدقة. يراقب
طويلة المدى ، 1.8 كيلومتر ، من Arduino إلى Arduino Wireless Communication مع HC-12: 6 خطوات (بالصور)
")
طويلة المدى ، 1.8 كيلومتر ، من Arduino إلى Arduino Wireless Communication مع HC-12: ستتعلم في هذه التعليمات كيفية التواصل بين Arduinos على مسافة طويلة تصل إلى 1.8 كيلومتر في الهواء الطلق. HC-12 هو منفذ تسلسلي لاسلكي وحدة اتصال مفيدة للغاية وقوية للغاية وسهلة الاستخدام. أولا سوف تتسرب
ThingSpeak و ESP32 ودرجة الحرارة والرطوبة اللاسلكية طويلة المدى: 5 خطوات

ThingSpeak و ESP32 ودرجة الحرارة والرطوبة اللاسلكية طويلة المدى: في هذا البرنامج التعليمي ، سنقيس بيانات درجات الحرارة والرطوبة المختلفة باستخدام مستشعر درجة الحرارة والرطوبة. سوف تتعلم أيضًا كيفية إرسال هذه البيانات إلى ThingSpeak. بحيث يمكنك تحليلها من أي مكان لتطبيقات مختلفة
عالية الطاقة ، طويلة المدى ، القوس القلم دقيق للغاية !!!: 6 خطوات

قوس قلم عالي الطاقة وطويل المدى ودقيق للغاية !!!: هذا واحد آخر من أقواس القلم الشهيرة !!! =) استمتع! ملاحظة. هذه الأشياء قوية نوعًا ما ، لا تستهدف شخصًا ما. تنصل: لا يمكنك مقاضاتي إذا قطعت أي شيء عن هذا بما في ذلك الناس والحيوانات. هذا هو أول Instructable لي مناشدات