")
جدول المحتويات:
- مؤلف John Day day@howwhatproduce.com.
- Public 2024-01-30 07:41.
- آخر تعديل 2025-01-23 12:54.

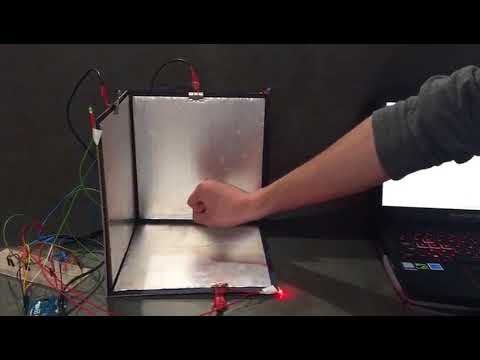

في هذه التعليمات ، يتم شرح كيفية تتبع حركة اليد في مساحة ثلاثية الأبعاد باستخدام مبدأ الاستشعار بالسعة. ستختلف سعة المكثف عن طريق تغيير المسافة بين رقاقة الألومنيوم المشحونة ويدك. يمكن استخدام هذه الطريقة كبديل منخفض لأنظمة القصور الذاتي والضوئية لتتبع الحركة في الفضاء ثلاثي الأبعاد. في هذا النموذج الأولي ، أضفنا مصابيح LED التي ستتوهج عندما يتحرك الكائن بالقرب من ورقة رقائق الألومنيوم.
الخطوة 1: الأدوات والمواد المطلوبة
- 3x 270 كيلو أوم المقاوم
- 3x 10 كيلو أوم المقاوم
- 3x مشبك التمساح
- 1x ليد أحمر
- 1x أزرق ليد
- 1x أخضر ليد
- 3x 220 أوم المقاوم
- جندى
- الانكماش الحراري
- كابل درع
- اردوينو أونو
- ورق ألومنيوم
- ورق مقوى
- شريط
- رش الغراء
- اللوح
- أسلاك التوصيل (أطوال متفاوتة)
الخطوة 2: بناء الإطار




اقطع ثلاث قطع مربعة من الورق المقوى (250 × 250 مم) وثلاث قطع مربعة من رقائق الألومنيوم (230 × 230 مم). ضع غراء الرذاذ على جانب واحد من ورق الألمنيوم وقم بتطبيق كل منها على قطع الكرتون. في هذا النموذج الأولي ، ستعمل صفائح رقائق الألومنيوم كمستشعرات سعوية. لذلك تأكد من وجود مسافة كافية بين ورق الألومنيوم وحدود الورق المقوى ، حتى لا يكون هناك تلامس بين الألواح المختلفة من الرقائق بمجرد تجميع الإطار. بمجرد وضع الرقاقة على الورق المقوى ، حان الوقت لتجميع القطع الثلاث من الورق المقوى باستخدام شريط لإكمال الإطار. مرة أخرى ، تأكد من عدم وجود تلامس بين صفائح رقائق الألومنيوم المختلفة.
الخطوة 3: توصيل أسلاك الواقي باللوحة و Arduino



من المهم استخدام كبل محمي لتوصيل الرقائق بالدائرة. سيؤدي استخدام الكابلات العادية إلى إحداث تأثير هوائي ويتداخل مع قراءات المستشعر. تأكد من أن لديك 3 كبلات محمية يبلغ طولها حوالي 50 سم. خذ كبلًا واحدًا ، وقم بفك السلك ، واقطع أسلاك التدريع واستخدم السلك الداخلي فقط لتوصيله عن طريق لحام السلك بمشبك التمساح. تأكد من تطبيق انكماش حراري لتغطية وصلة اللحام. قص مقاطع التمساح بورق الألمنيوم.
قم بتوصيل جميع أسلاك الدرع بالصف الموجب للوح الخاص بك. ثم قم بتوصيل هذا الصف الموجب بوصلة 5V على Arduino. الآن خذ السلك الرئيسي من كابل الدرع ، وقم بتوصيل 10 كيلو أوم و 220 كيلو أوم المقاوم بالتوازي. قم بتوصيل هذا بمنفذ الإخراج الخاص بـ Arduino (استخدمنا 8 و 9 و 10).
كرر هذه الخطوة مرتين أخريين للطائرات الأخرى من النموذج الأولي.
الخطوة 4: توصيل أسلاك المصابيح




قم بتلحيم نهايات مصابيح LED بسلك طويل حتى تتمكن من الوصول إلى زوايا اللوحات المعنية من لوحة اردوينو.
استخدمنا المسامير 2 و 3 و 4 كدبابيس إخراج لمصابيح LED الخاصة بنا. هذا الإخراج متصل بلوح التجارب ومتصل بالجزء الموجب من مؤشر LED. يتم بعد ذلك توصيل الجزء السالب من LED بالمقاوم 330 أوم. يتم توصيل الطرف الآخر من المقاوم بأرض اللوح ، وهو متصل بأرض Arduino. كرر هذا مع جميع المصابيح الثلاثة. في النموذج الأولي الخاص بنا ، يتم توصيل مؤشر LED الأزرق بالطائرة Y ، ومؤشر LED الأحمر بالطائرة Z ومصباح LED الأخضر بالطائرة X. قم بتثبيت مصابيح LED على المستويات المقابلة للحصول على تعليقات مباشرة عند استخدام النموذج الأولي.
إذا كنت لا تستخدم لوح التجارب وتريد توصيل كابل الحماية مباشرة بـ Arduino ، يمكنك رؤية الصورة المرفقة للحصول على نظرة عامة لطيفة على وصلات اللحام. يجب أن تبدو اتصالاتك النهائية مثل صورة النظرة العامة.
الخطوة 5: التشفير
في المرفق وضعنا الكود الذي استخدمناه لهذه التجربة. للحصول على رؤى إضافية ، يتم وضع تعليق بعد كل أمر رئيسي يشرح ما يحدث في الكود. افتح الكود في برنامج Arduino على جهاز الكمبيوتر الخاص بك ، وقم بتحميله على Arduino الخاص بك. إذا كنت تستخدم جهاز كمبيوتر محمول ، فتأكد من شحنه ؛ وإلا لن يعمل النموذج الأولي الخاص بك.
الخطوة 6: استخدام النموذج الأولي
تعد طريقة تتبع الحركة ثلاثية الأبعاد هذه حساسة جدًا للمتغيرات المحيطة. لذلك تأكد من معايرة القيم الموجودة في الكود وفقًا لموقفك. يمكنك ببساطة استخدام الشاشة التسلسلية للحصول على القيم الصحيحة. نصيحة: يمكنك إنشاء معايرة بنفسك ، حيث تأخذ القيم المتوسطة + 10٪ عند تشغيل الكود. يوضح الفيديو كيف يجب أن يعمل النموذج الأولي بشكل صحيح.
موصى به:
خريطة تتبع GPS ثلاثية الأبعاد: 9 خطوات

خريطة تتبع GPS ثلاثية الأبعاد: هذا المشروع عبارة عن خريطة ثلاثية الأبعاد مطبوعة ثلاثية الأبعاد ، مع طرق وأنهار وبلدات ، مع منارات LED لإظهار موقع أفراد الأسرة. يمكن أن يوضح ما إذا كان الطفل في المدرسة أم لا ، أو مجرد موقع كلا الوالدين. يمكننا أيضًا استخدامه للتنبؤ بـ
متزلج كاميرا تتبع الكائن مع محور الدوران. طباعة ثلاثية الأبعاد ومبنية على وحدة تحكم محرك RoboClaw DC و Arduino: 5 خطوات (بالصور)
")
متزلج كاميرا تتبع الكائن مع محور الدوران. 3D مطبوعة ومبنية على RoboClaw DC Motor Controller & Arduino: كان هذا المشروع أحد مشاريعي المفضلة منذ أن تمكنت من الجمع بين اهتماماتي في صناعة الفيديو مع DIY. لطالما نظرت وأردت محاكاة تلك اللقطات السينمائية في الأفلام حيث تتحرك الكاميرا عبر الشاشة أثناء التحريك لتتبع
شريحة كاميرا بمحرك مع نظام تتبع (طباعة ثلاثية الأبعاد): 7 خطوات (بالصور)
: 7 خطوات (بالصور)")
سلايدر كاميرا بمحرك مع نظام تتبع (مطبوع ثلاثي الأبعاد): بشكل أساسي ، هذا الروبوت سوف يحرك كاميرا / هاتف ذكي على سكة حديد و "يتعقب" كائنًا. موقع الكائن المستهدف معروف بالفعل بواسطة الروبوت. الحساب وراء نظام التتبع هذا بسيط للغاية. لقد أنشأنا محاكاة لعملية التتبع
حاوية حرارية للطابعة ثلاثية الأبعاد: إصلاح الالتفاف على المطبوعات ثلاثية الأبعاد: 4 خطوات

العلبة الحرارية للطابعة ثلاثية الأبعاد: إصلاح الالتواء على المطبوعات ثلاثية الأبعاد: واجه كل شخص لديه طابعة ثلاثية الأبعاد في وقت ما مشكلة الالتواء. المطبوعات التي تستغرق ساعات ينتهي بها الأمر للتلف لأن القاعدة تقشر بعيدًا عن السرير. قد تكون هذه المشكلة محبطة وتستغرق وقتًا طويلاً. إذن ما cau
مروحية ثلاثية الأبعاد مطبوعة ثلاثية الأبعاد FPV يتم التحكم فيها عبر شبكة Wifi Micro: 7 خطوات (مع صور)
")
مروحية Micro Wifi ثلاثية الأبعاد مطبوعة FPV مطبوعة ثلاثية الأبعاد: بعد أول كتابين لي & quot؛ WifiPPM & quot؛ و & quot؛ Lowcost 3d Fpv Camera لنظام Android & quot؛ أريد أن أظهر كوادكوبتر الصغير مع كلا الجهازين المرفقين. لا تحتاج إلى أي أجهزة إضافية مثل جهاز إرسال RC أو نظارات FPV لذلك